“电信杯”二等奖作品《体感手套操控的超声波寻物机械臂》(《mearm》)介绍
in 机械/电子/内核
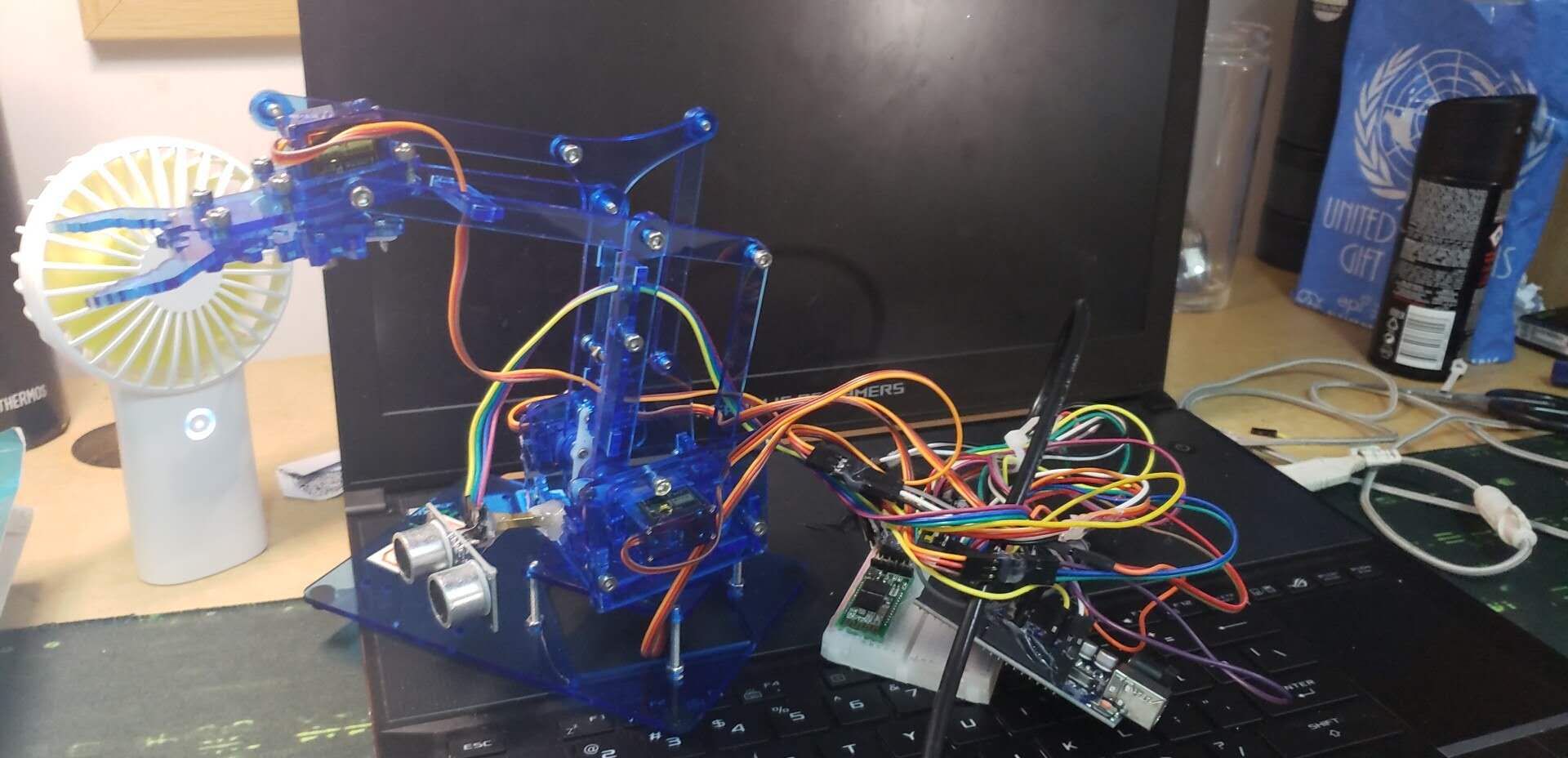
“电信杯”二等奖作品《体感手套操控的超声波寻物机械臂》(《mearm》)介绍
原 创 性 声 明 本团队郑重声明:所呈交的作品及论文,是本团队在指导老师的指导下,独立进行研究所取得的成果。除文中已经注明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的科研成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本声明的法律责任由本人承担。
快速目录
整机电路
 2.1.1 原理方框图
2.1.1 原理方框图
 2.1.2 体感手套主板原理方框图
2.1.2 体感手套主板原理方框图
 2.1.3 体感手套主板芯片介绍
2.1.3 体感手套主板芯片介绍
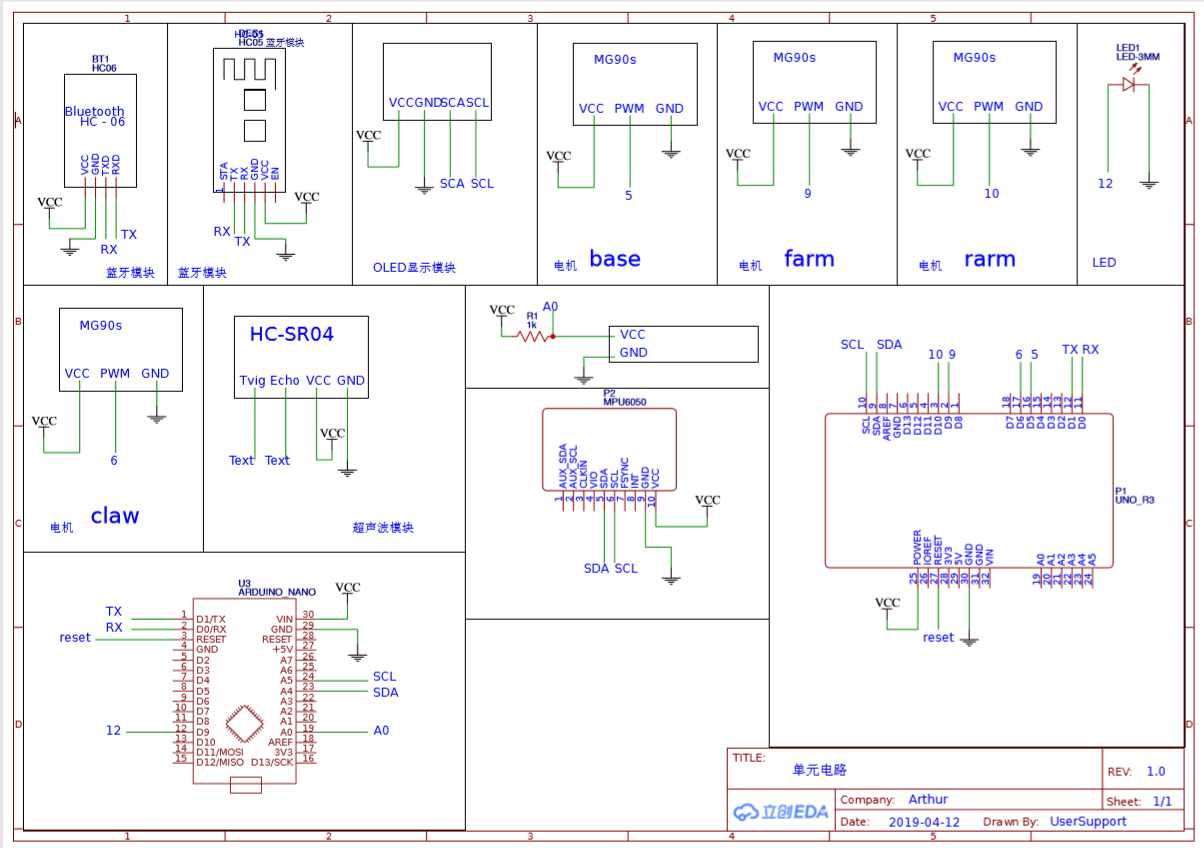
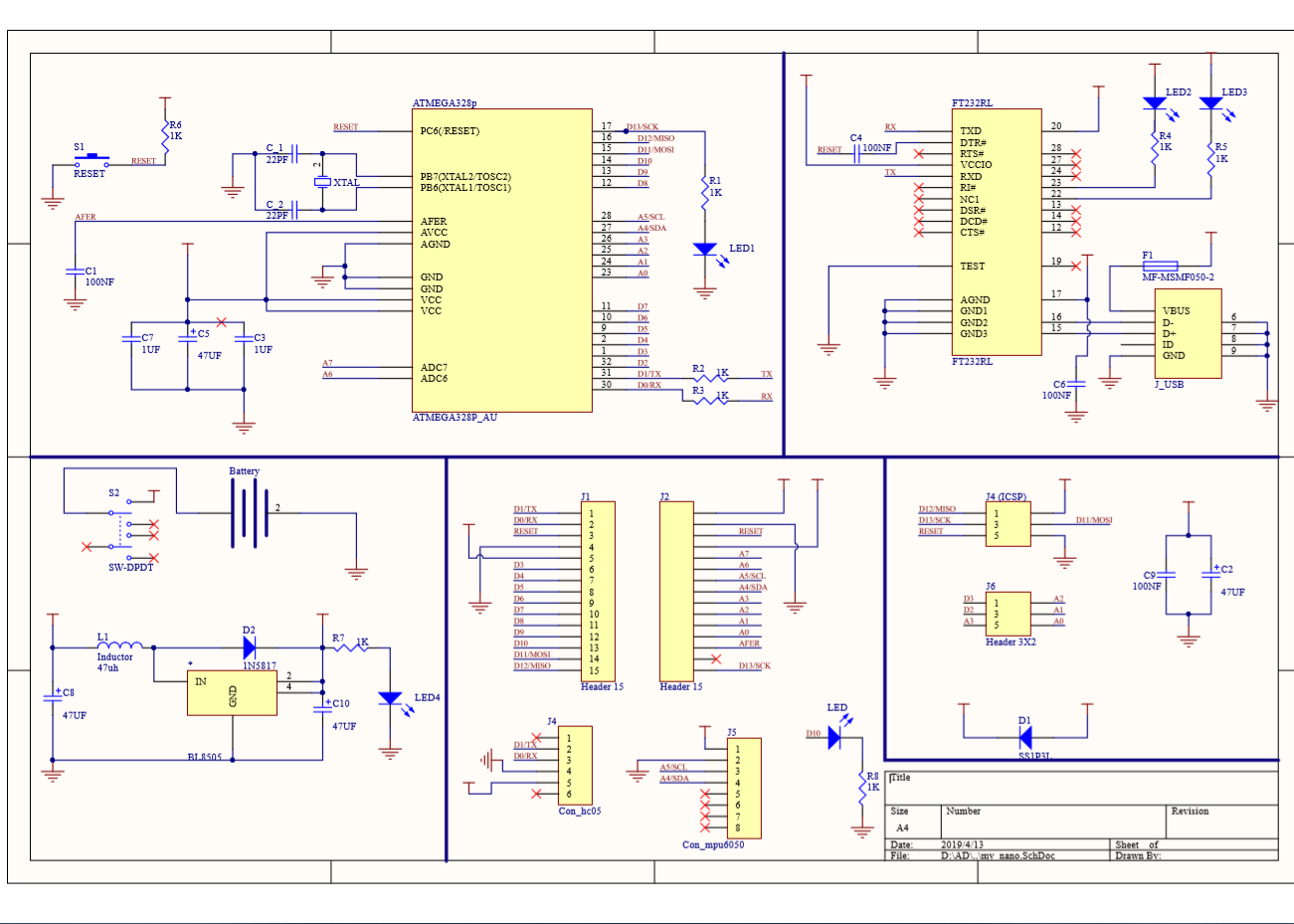
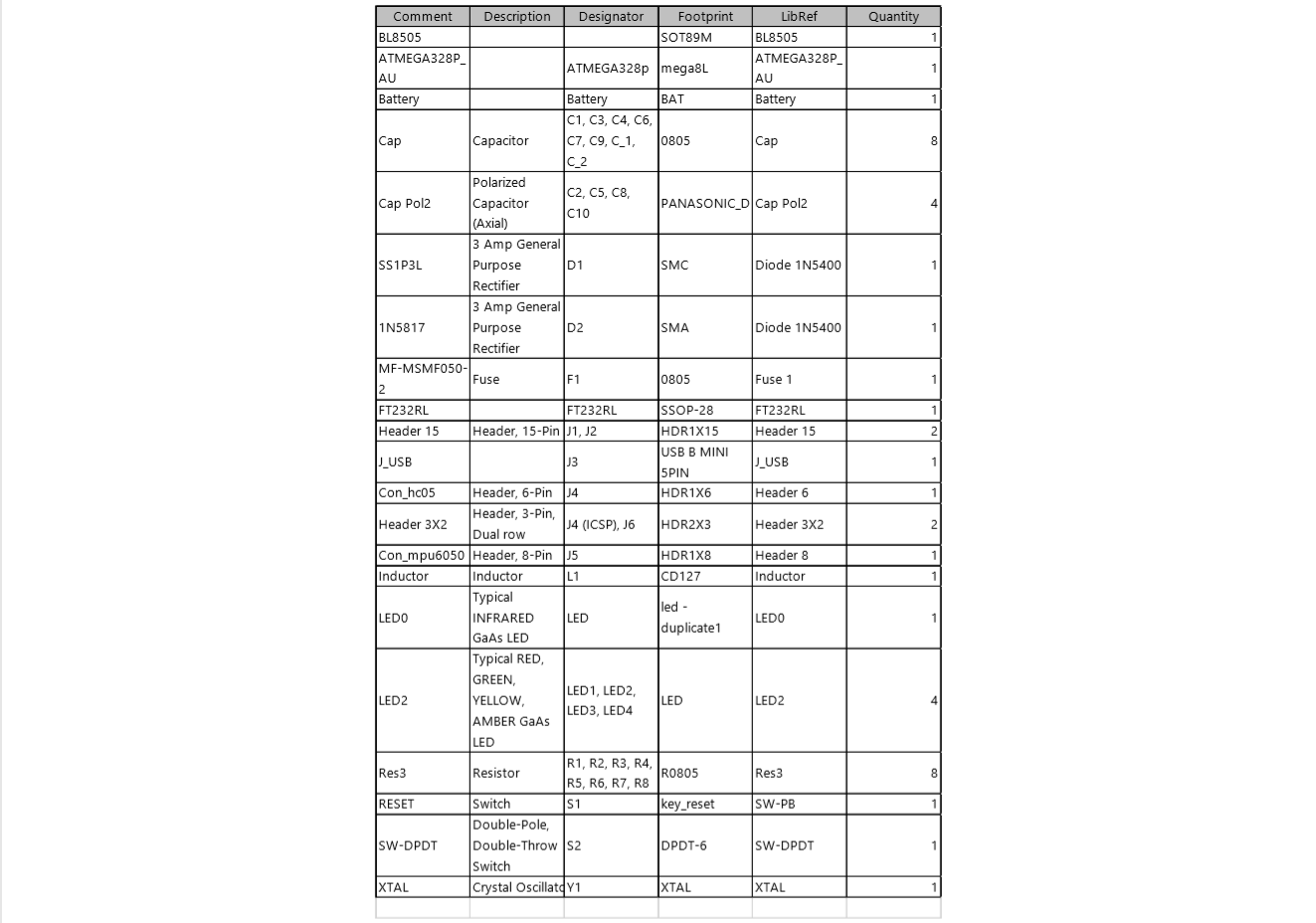
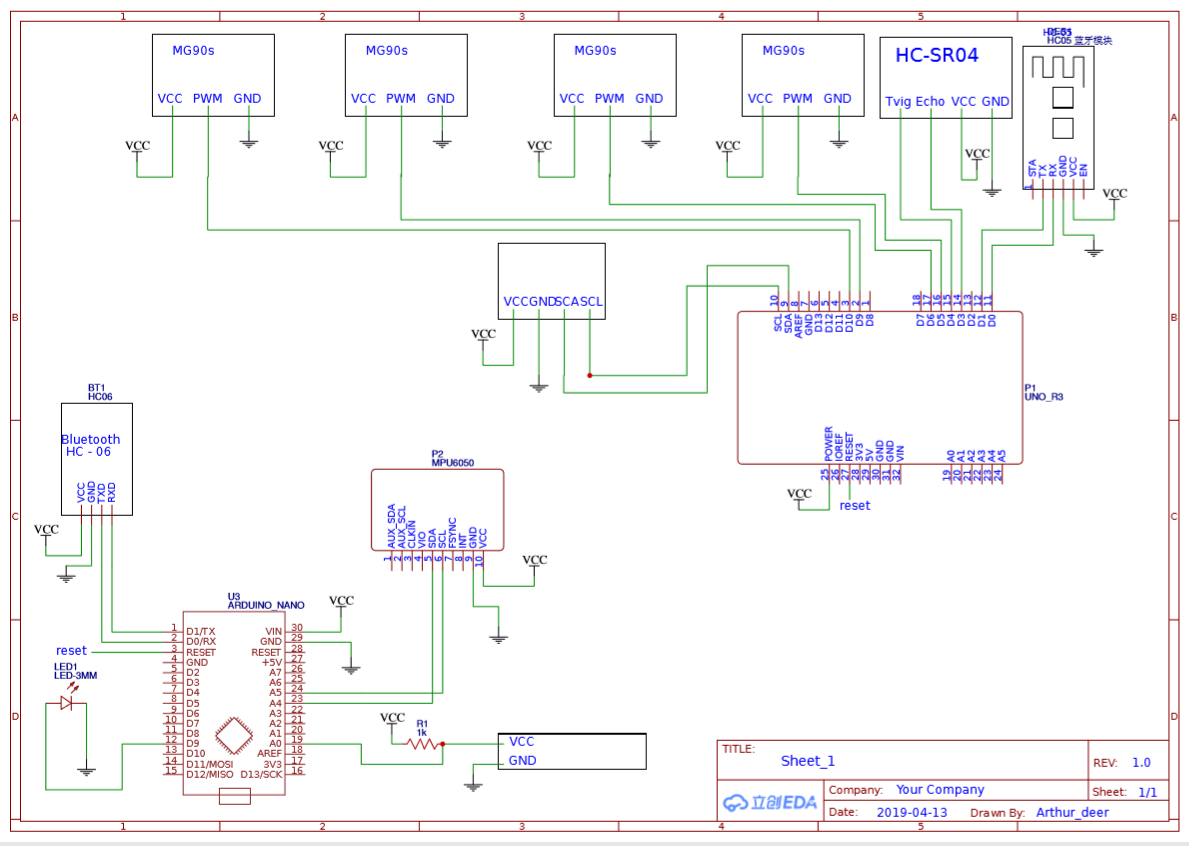 2.2.1 全部系统原理图
2.2.1 全部系统原理图
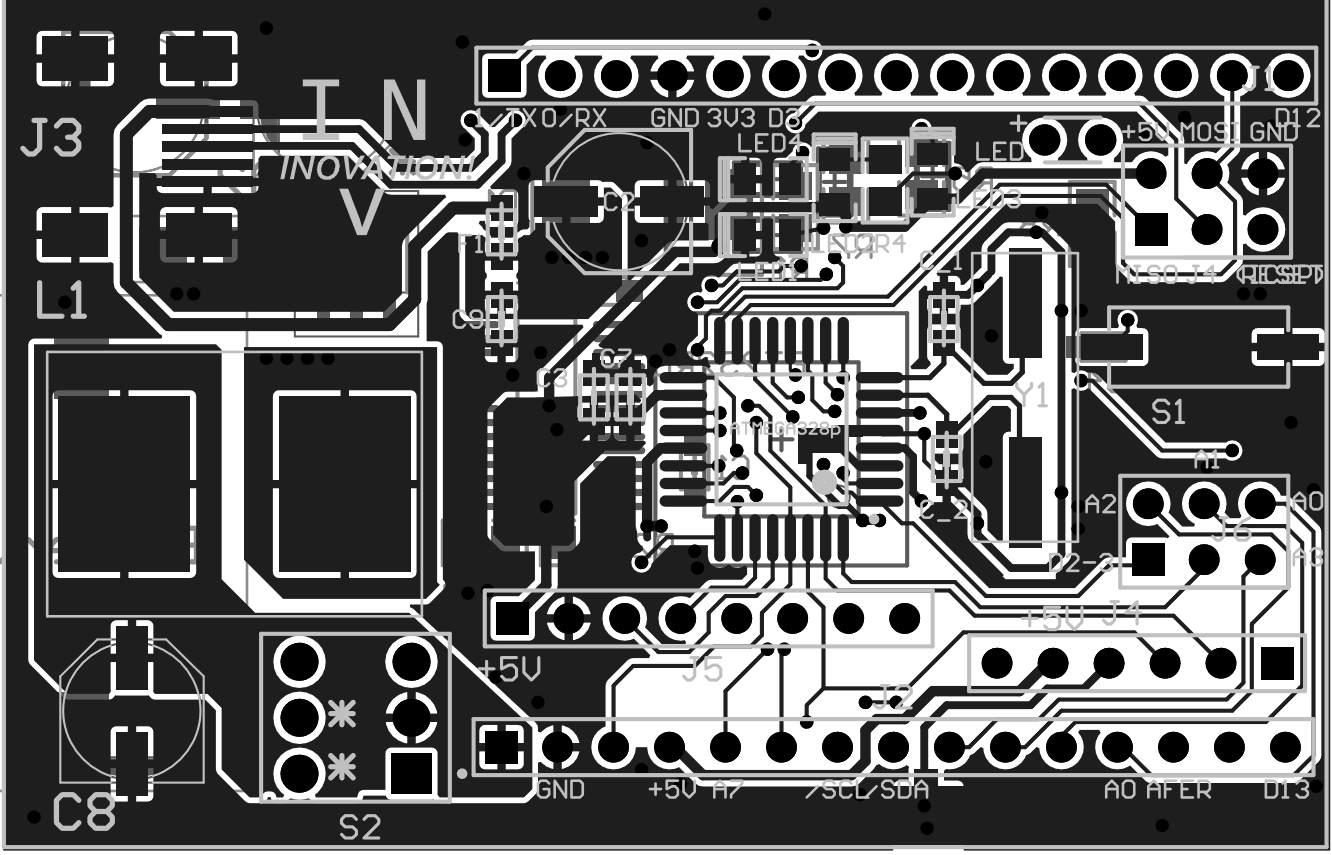 2.2.2 体感手套arduino主板的PCB设计图(正面)
2.2.2 体感手套arduino主板的PCB设计图(正面)
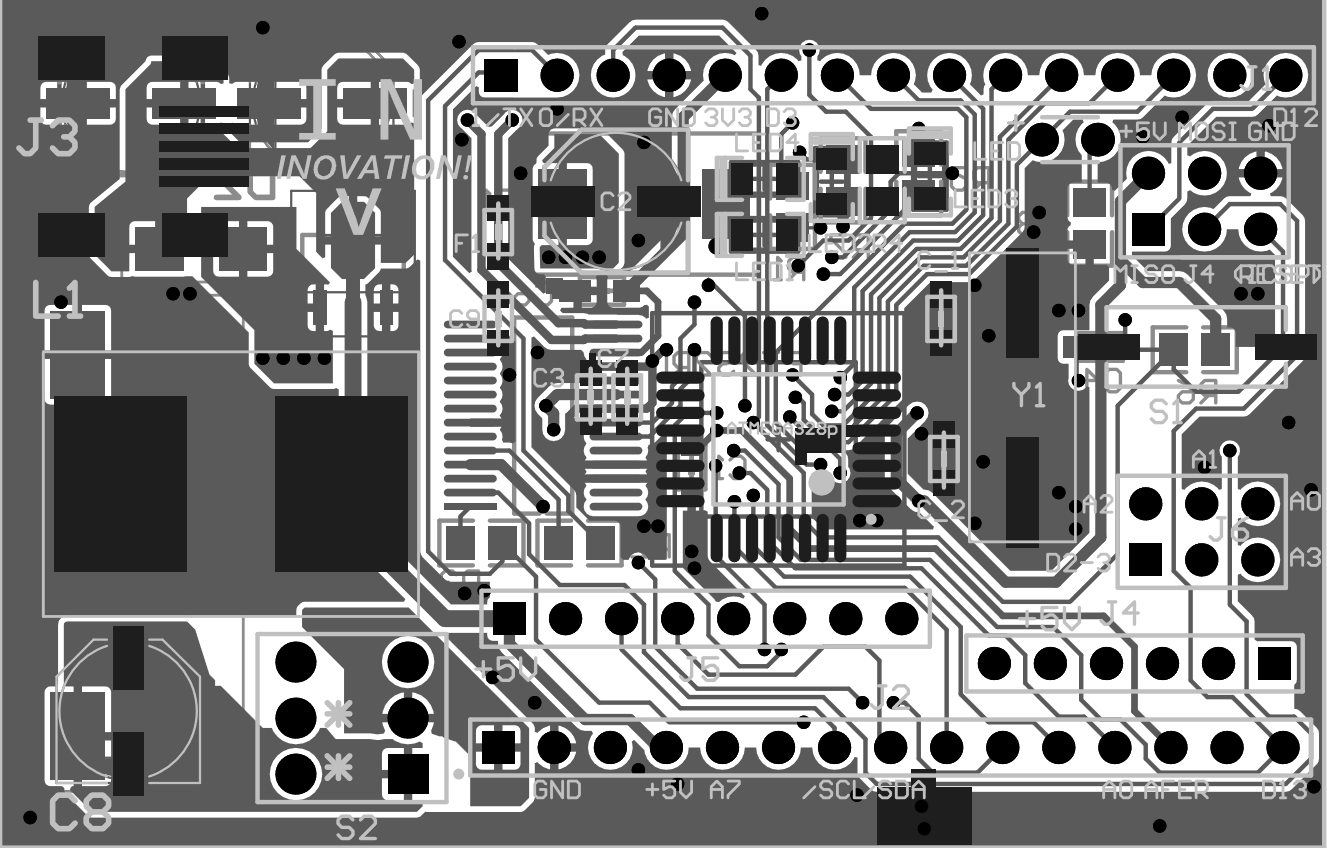 2.2.3 体感手套arduino主板的PCB设计图(反面)
2.2.3 体感手套arduino主板的PCB设计图(反面)
单元电路设计(略网上都有)
- 舵机
- OLED
- 超声波模块
- 蓝牙模块
- MPU6050
弯曲传感器
##程序代码 机械臂部分代码
#include <string.h>
#include <Servo.h>
#include "U8glib.h"
U8GLIB_SSD1306_128X32 u8g(U8G_I2C_OPT_NONE);
void u8g_prepare(void) {
u8g.setFont(u8g_font_osb21);
u8g.setFontRefHeightExtendedText();
u8g.setDefaultForegroundColor();
u8g.setFontPosTop();
}
uint8_t draw_state = 0;
char serialCmd;
void u8g_disc_circle(uint8_t a) {
switch (serialCmd)
{
case 'f':u8g.drawStr( 0, 0, "fArmdow");break;
case 'e':u8g.drawStr( 0, 0, "fArmup");break;
case 'd':u8g.drawStr( 0, 0, "rArmup");break;
case 'c':u8g.drawStr( 0, 0, "rArmdow");break;
case 'h':u8g.drawStr( 0, 0, "clawope");break;
case 'g':u8g.drawStr( 0, 0, "clawclo");break;
case 'r':u8g.drawStr( 0, 0, "search");break;
case 'o':u8g.drawStr( 0, 0, "findout");break;
case 'w':u8g.drawStr( 0, 0, "working");break;
}
}
void draw(void) {
u8g_prepare();
switch(draw_state >> 3) {
case 0: u8g_disc_circle(draw_state&7); break;
}
}
////////////
void out_screen()
{
u8g.firstPage();
do {
draw();
} while( u8g.nextPage() );
draw_state++;
if ( draw_state >= 1*8 )
draw_state = 0;
return ;
}
/////////////
#define TB (fromPos+to*2)
#define TF (fromPos+to*2)
#define TR (fromPos+to*2)
#define TC (fromPos+to*10)
Servo base, fArm, rArm, claw ;
const int baseMin = 0;
const int baseMax = 180;
const int rArmMin = 45;
const int rArmMax = 180;
const int fArmMin = 35;
const int fArmMax = 120;
const int clawMin = 0;
const int clawMax = 100;
const int EchoPin = 4;
const int TrigPin = 3;
int DSD = 15;
int moveStep = 3;
void setup()
{
base.attach(5);
delay(200);
rArm.attach(10);
delay(200);
fArm.attach(9);
delay(200);
claw.attach(6);
delay(200);
serialCmd = 'w';
out_screen();
base.write(90);
delay(10);
fArm.write(90);
delay(10);
rArm.write(90);
delay(10);
claw.write(90);
delay(10);
u8g_prepare();
Serial.begin(38400);
/////////////////
pinMode(TrigPin, OUTPUT);
pinMode(EchoPin, INPUT);
pinMode(2, OUTPUT);
digitalWrite(2,HIGH);
/////////////////
}
void loop()
{
if (Serial.available()>0)
{
serialCmd = Serial.read();
out_screen();
armDataCmd(serialCmd);
////////////////////////
//////////////////////////
}
}
void armDataCmd(char serialCmd)
{
switch(serialCmd)
{
case 'a':
ser('b',1);
break;
case 'b':
ser('b',-1);
break;
case 'c':
ser('r',1);
break;
case 'd':
ser('r',-1);
break;
case 'e':
ser('f',1);
break;
case 'f':
ser('f',-1);
break;
case 'g':
claw.write(clawMin);
break;
case 'h':
claw.write(clawMax);
break;
case 'r':
armIniPos();
break;
}
reportStatus();
}
void ser(char servoName, int to)
{
int fromPos;
switch(servoName){
case 'b':
fromPos=base.read();
if(TB>= baseMin && TB<= baseMax)
base.write(TB);
break;
case 'r':
fromPos=rArm.read();
if(TR>= rArmMin && TR<= rArmMax)
rArm.write(TR);
break;
case 'f':
fromPos=fArm.read();
if(TF>= fArmMin && TF<= fArmMax)
fArm.write(TF);
break;
case 'c':
fromPos=claw.read();
if(TC>= clawMin && TC<= clawMax)
claw.write(TC);
break;
}
}
void reportStatus(){
}
//////
void servoCmd(char servoName, int toPos, int servoDelay){
Servo servo2go;
int fromPos;
switch(servoName){
case 'b':
if(toPos >= baseMin && toPos <= baseMax){
servo2go = base;
fromPos = base.read();
}
break;
case 'c':
if(toPos >= clawMin && toPos <= clawMax){
servo2go = claw;
fromPos = claw.read();
}
break;
case 'f':
if(toPos >= fArmMin && toPos <= fArmMax){
servo2go = fArm;
fromPos = fArm.read();
}
break;
case 'r':
if(toPos >= rArmMin && toPos <= rArmMax){
servo2go = rArm;
fromPos = rArm.read();
}
break;
}
if (fromPos <= toPos){
for (int i=fromPos; i<=toPos; i++){
servo2go.write(i);
delay (servoDelay);
}
} else {
for (int i=fromPos; i>=toPos; i--){
servo2go.write(i);
delay (servoDelay);
}
}
}
int findit()
{
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
return ((int)(pulseIn(EchoPin, HIGH) / 58.0));
}
void armIniPos(){
int robotIniPosArray[4][3] = {
{'b', 90, DSD},
{'r', 90, DSD},
{'f', 90, DSD},
{'c', 90, DSD}
};
for (int i = 0; i < 4; i++){
servoCmd(robotIniPosArray[i][0], robotIniPosArray[i][1], robotIniPosArray[i][2]);
}
int fin,ste;
fin = 90; ste = 1;
while(1)
{
if(fin == baseMax)
ste = -1;
if(fin == baseMin)
ste = 1;
if(findit()<=12)
{
delay(500);
if(findit()<=12)
{base.write(fin+8*ste);
serialCmd = 'o';
out_screen();
break;}
}
/////////
base.write(fin);
fin += ste;
delay(10);
}
//////////
for(int i = 0 ; i <= 100 ; i++)
{
while(Serial.available()>0)char cle = Serial.read();
}
///////////
}
体感手套部分代码
#include <MPU6050.h>
#include <I2Cdev.h>
#include <Wire.h>
MPU6050 accelgyro;
unsigned long now, lastTime =0;
float dt;
int16_t ax, ay, az, gx, gy, gz;
float aax=0, aay=0, aaz=0, agx=0, agy=0, agz=0;
long axo = 0, ayo = 0, azo = 0; //加速度计偏移量
long gxo = 0, gyo = 0, gzo = 0; //陀螺仪偏移量
float pi = 3.14;
float AcceRatio = 16384.0; //加速度计比例系数
float GyroRatio = 131.0; //陀螺仪比例系数
uint8_t n_sample = 8; //加速度计滤波算法采样个数
float aaxs[8] = {0}, aays[8] = {0}, aazs[8] = {0}; //x,y轴采样队列
long aax_sum, aay_sum,aaz_sum; //x,y轴采样和
float a_x[10]={0}, a_y[10]={0},a_z[10]={0} ,g_x[10]={0} ,g_y[10]={0},g_z[10]={0}; //加速度计协方差计算队列
float Px=1, Rx, Kx, Sx, Vx, Qx; //x轴卡尔曼变量
float Py=1, Ry, Ky, Sy, Vy, Qy; //y轴卡尔曼变量
float Pz=1, Rz, Kz, Sz, Vz, Qz; //z轴卡尔曼变量
int a,b,c,d,e,f,k,temp_up,temp_down,aa,bb,cc,dd,ee,ff,kk,wanquu=0,wanqqu=0;
long long i=2;
#define LED 10
void setup()
{
Wire.begin();
Serial.begin(38400);
pinMode(LED,OUTPUT);
Serial.print('r');
pinMode(3,OUTPUT);
digitalWrite(3,HIGH);
delay(8000);
accelgyro.initialize(); //初始化
unsigned short times = 100; //采样次数
for(int i=0;i<times;i++)
{
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //读取六轴原始数值
axo += ax; ayo += ay; azo += az; //采样和
gxo += gx; gyo += gy; gzo += gz;
}
axo /= times; ayo /= times; azo /= times; //计算加速度计偏移
gxo /= times; gyo /= times; gzo /= times; //计算陀螺仪偏移
}
void loop()
{
unsigned long now = millis(); //当前时间(ms)
dt = (now - lastTime) / 1000.0; //微分时间(s)
lastTime = now; //上一次采样时间(ms)
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //读取六轴原始数值
float accx = ax / AcceRatio; //x轴加速度
float accy = ay / AcceRatio; //y轴加速度
float accz = az / AcceRatio; //z轴加速度
aax = atan(accy / accz) * (-180) / pi; //y轴对于z轴的夹角
aay = atan(accx / accz) * 180 / pi; //x轴对于z轴的夹角
aaz = atan(accz / accy) * 180 / pi; //z轴对于y轴的夹角
aax_sum = 0; // 对于加速度计原始数据的滑动加权滤波算法
aay_sum = 0;
aaz_sum = 0;
for(int i=1;i<n_sample;i++)
{
aaxs[i-1] = aaxs[i];
aax_sum += aaxs[i] * i;
aays[i-1] = aays[i];
aay_sum += aays[i] * i;
aazs[i-1] = aazs[i];
aaz_sum += aazs[i] * i;
}
aaxs[n_sample-1] = aax;
aax_sum += aax * n_sample;
aax = (aax_sum / (11*n_sample/2.0)) * 9 / 7.0; //角度调幅至0-90°
aays[n_sample-1] = aay; //此处应用实验法取得合适的系数
aay_sum += aay * n_sample; //本例系数为9/7
aay = (aay_sum / (11*n_sample/2.0)) * 9 / 7.0;
aazs[n_sample-1] = aaz;
aaz_sum += aaz * n_sample;
aaz = (aaz_sum / (11*n_sample/2.0)) * 9 / 7.0;
float gyrox = - (gx-gxo) / GyroRatio * dt; //x轴角速度
float gyroy = - (gy-gyo) / GyroRatio * dt; //y轴角速度
float gyroz = - (gz-gzo) / GyroRatio * dt; //z轴角速度
agx += gyrox; //x轴角速度积分
agy += gyroy; //x轴角速度积分
agz += gyroz;
/* kalman start */
Sx = 0; Rx = 0;
Sy = 0; Ry = 0;
Sz = 0; Rz = 0;
for(int i=1;i<10;i++)
{ //测量值平均值运算
a_x[i-1] = a_x[i]; //即加速度平均值
Sx += a_x[i];
a_y[i-1] = a_y[i];
Sy += a_y[i];
a_z[i-1] = a_z[i];
Sz += a_z[i];
}
a_x[9] = aax;
Sx += aax;
Sx /= 10; //x轴加速度平均值
a_y[9] = aay;
Sy += aay;
Sy /= 10; //y轴加速度平均值
a_z[9] = aaz;
Sz += aaz;
Sz /= 10;
for(int i=0;i<10;i++)
{
Rx += sq(a_x[i] - Sx);
Ry += sq(a_y[i] - Sy);
Rz += sq(a_z[i] - Sz);
}
Rx = Rx / 9; //得到方差
Ry = Ry / 9;
Rz = Rz / 9;
Px = Px + 0.0025; // 0.0025在下面有说明...
Kx = Px / (Px + Rx); //计算卡尔曼增益
agx = agx + Kx * (aax - agx); //陀螺仪角度与加速度计速度叠加
Px = (1 - Kx) * Px; //更新p值
Py = Py + 0.0025;
Ky = Py / (Py + Ry);
agy = agy + Ky * (aay - agy);
Py = (1 - Ky) * Py;
Pz = Pz + 0.0025;
Kz = Pz / (Pz + Rz);
agz = agz + Kz * (aaz - agz);
Pz = (1 - Kz) * Pz;
/* kalman end */
if((int)agx>45 ) cc+=2; //大臂向下
else if((int)agx<-45)dd+=2; //大臂向上
else if((int)agy>40 ) ee+=2; //前臂向左
else if((int)agy<-30)ff+=2; //前臂向右
else if((int)agx>30 ) cc++; //大臂向下
else if((int)agx<-30)dd++; //大臂向上
else if((int)agy>25 ) ee++; //前臂向左
else if((int)agy<-20) ff++; //前臂向右
if(cc>5)
{Serial.print('c'); cc=0;}
if(dd>5)
{Serial.print('d'); dd=0;}
if(ee>5)
{Serial.print('e'); ee=0;}
if(ff>5)
{Serial.print('f'); ff=0;}
//
// if((int)agz>45 ) aa++; //大臂向下
// else if((int)agz<-45)bb++; //大臂向上
// if(aa>30)
// {Serial.print('a'); aa=0;}
// if(bb>30)
// {Serial.print('b'); bb=0;}
// else if((int)agy>45)Serial.print('e');//前臂向左
// else if((int)agy<-45)Serial.print('f');//前臂向右
// temp_up=agz+10;
// temp_down=agz-10;
// else if((int)agz<-45)Serial.print('a');//base向左
// else if((int)agz>45)Serial.print('b');//base向右
// else if(agx>-30&&agx<30&&agy>-30&&agy<30) digitalWrite(LED, HIGH);
// else digitalWrite(LED, LOW);
if(i%10==0)
{
if(analogRead(A0)<750)
{ Serial.print('h'); i++; delay(200);}
i-=10;
}
if(i%10==1)
{
if(analogRead(A0)>980)
{ Serial.print('g'); i++;delay(200); }
i-=10;
}
// else if(wanqu>00)
{
//45度
}
// else //四十五度以下
delay(20);
i+=2;
}