Gin+Vue 2
in 语言/工程/算法
in 语言/工程/算法
in 语言/工程/算法
in 机械/电子/内核
运动控制使用stm32F405作为主控,操作系统为Freertos,主要作为接受HERO运动控制指令和返回编码盘里程计,世界坐标系解算至电机速度,并且电机PID速度闭环控制。其中闭环控制频率为1KHZ,接受控制频率为20HZ,其上接受陀螺仪模块可以供主控进行里程计的卡尔曼滤波校准。 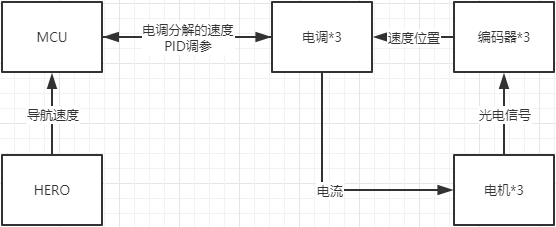
in 机械/电子/内核
RobotLabcube顾名思义是去仿照所谓的stm32cube的基于SRML和电机库的代码生成工具,目前是打算去用Java或者是C去写
in 语言/工程/算法
大多数使用springboot 但是这次我是用了ssm也就是java,可能以后的项目可以要用PHP了。